
核心功能
全面的机器人仿真解决方案,满足从设计到部署的全流程需求
3D建模与数字孪生
创建高精度机器人和环境模型,支持CAD导入、参数化设计和实时渲染,实现物理世界的精确数字映射。
- 支持多种CAD格式导入
- 参数化模型生成
- 高保真材质与纹理
物理仿真引擎
基于先进的物理引擎,提供真实的力学、碰撞和传感器模拟,确保机器人行为与现实世界高度一致。
- 精确的刚体动力学
- 多传感器模拟
- 环境物理参数可调
ROS/ROS 2集成
无缝集成ROS/ROS 2生态系统,支持标准消息格式和通信机制,轻松连接真实机器人与仿真环境。
- 支持ROS 1和ROS 2
- 标准消息接口
- 实时数据同步
技术模块详情
深入了解我们的核心技术模块,为您的机器人开发提供强大支持
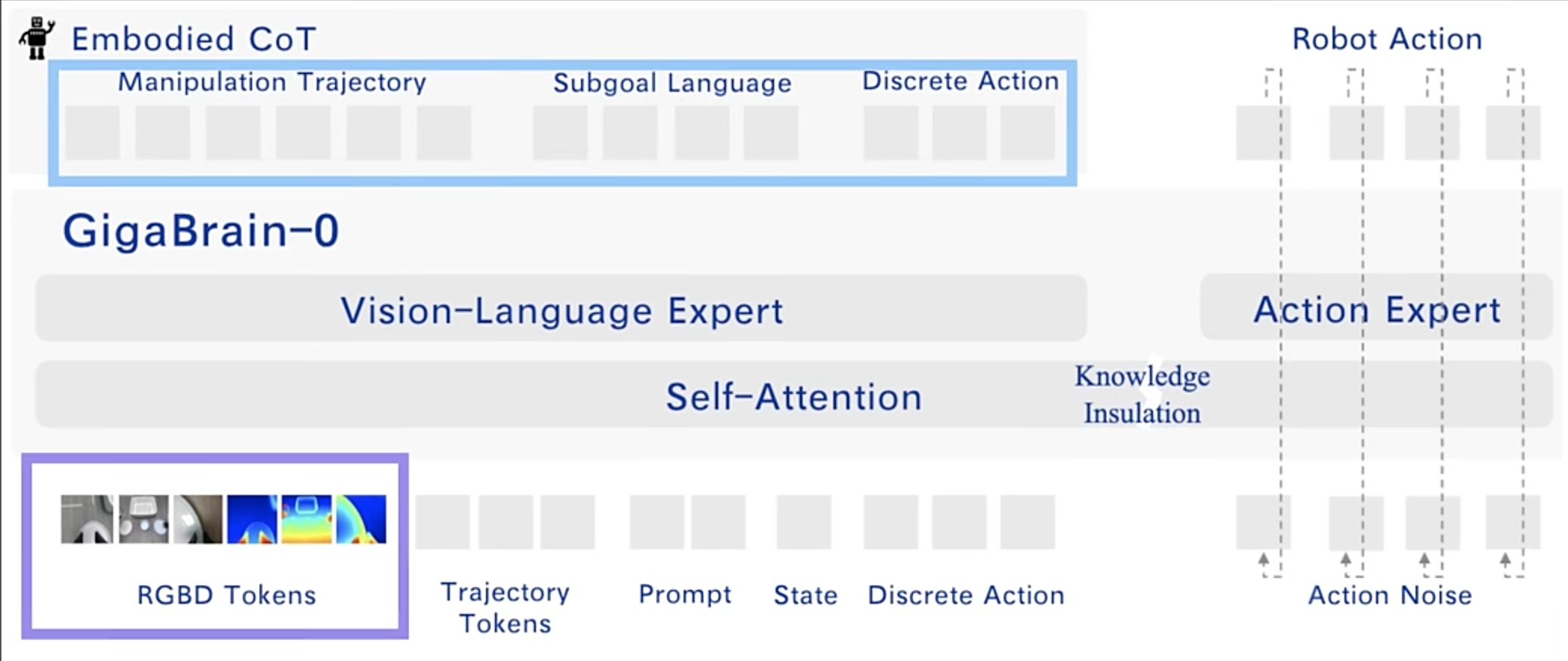
GigaBrain-0模型
针对当前机器人操作中的精准度不足和推理能力不足的问题,GigaBrain-0重点提升了3D空间感知能力和结构化的推理能力,通过引入这两项关键能力,GigaBrain-0可以完成更精准的移动导航和更长序列的复杂操作,具备更强泛化性,全球首次通过一脑多形、一段式端到端全身控制模型、一镜到底完成衣物整理类复杂、柔性、长程移动操作任务!
3D空间感知能力:加入Depth输入,更精准的移动导航
GigaBrain-0通过加入深度信息的输入,提升了物体3D位置和空间3D布 局的感知能力,这两点对于精确的双臂操作和精确的移动导航至关重要。
结构化推理能力:更稳定的长程、复杂任务表现
结构化推理能力:更稳定的长程、复杂任务表现 GigaBrain-0通过引入子目标拆解和机械臂末端轨迹输出,改进了自身在开 放场景中的任务规划和运动规划能力,极大提升了复杂、长程任务的成功率: 1)子目标拆解:模型在推理过程中,可以同时输出子任务的自然语言 描述,让GigaBrain-0对于长程任务的分解更合理。 2)末端轨迹输出:模型在推理过程中,增加了机械臂末端执行器运动 路径在图像平面上2D投影的输出,增强GigaBrain-0整体的全局动作规划能力。
CAD导入参数化建模高保真渲染数字孪生材质编辑

